Rotary_Encoder_v2_4_button_LCD-Combined-w-DDS-8951-w-reverse-BO
////WORKING = 4-11-2015 -
// revisited 5-15-2015
////HOLD BUTTON ON POWER UP TO Change from 9851 to 9850 & visa versa!
// Need to add "hold button to go back in decimal place"
// from http://www.multiwingspan.co.uk/arduino.php?page=rotary2
#include <Wire.h>
#include <LCD.h>
#include <LiquidCrystal_I2C.h>
#include <EEPROM.h>
#define I2C_ADDR 0x27 // <<----- Add your address here. Find it from I2C Scanner
#define BACKLIGHT_PIN 3
#define En_pin 2
#define Rw_pin 1
#define Rs_pin 0
#define D4_pin 4
#define D5_pin 5
#define D6_pin 6
#define D7_pin 7
int n = 1;
int valLen = 0;
LiquidCrystal_I2C lcd(I2C_ADDR, En_pin, Rw_pin, Rs_pin, D4_pin, D5_pin, D6_pin, D7_pin);
// Setting up the counter
long reading = 5000000;
int lowest = 0;
long highest = 99999999;
long changeamnt = 1;
// Timing for polling the encoder
unsigned long currentTime;
unsigned long lastTime;
unsigned long bpTime; // button press time for single press or hold
int AD9851 = 0; // default is 9850 when = 0, it is AD9851 when = 1
// Pin definitions
const int pinA = 10; //
const int pinB = 11; //
const int buttonPin = 5; // the number of the pushbutton pin
const int ledPin = 13; // the number of the LED pin
// Storing the readings
boolean encA;
boolean encB;
boolean lastA = false;
int buttonState = 0; // variable for reading the pushbutton status
#define W_CLK 6 // Pin 8 - connect to AD9850 module word load clock pin (CLK)
#define FQ_UD 7 // Pin 9 - connect to freq update pin (FQ)
#define DATA 8 // CHANGED Pin 10 - connect to serial data load pin (DATA)
#define RESET 9 // CHANGED Pin 11 - connect to reset pin (RST).
#define pulseHigh(pin) {digitalWrite(pin, HIGH); digitalWrite(pin, LOW); }
// transfers a byte, a bit at a time, LSB first to the 9850 via serial DATA line
void tfr_byte(byte data)
{
for (int i = 0; i < 8; i++, data >>= 1) {
digitalWrite(DATA, data & 0x01);
pulseHigh(W_CLK); //after each bit sent, CLK is pulsed high
}
}
// frequency calc from datasheet page 8 = <sys clock> * <frequency tuning word>/2^32
void sendFrequency(double frequency) {
//Serial.println("at sendFreq");
//fudge to get freq to = input freq
if (AD9851 == 0) { // using AD9850 chip if = 0
// Serial.println("at 9850!!!!");
int32_t freq = frequency * 4294967295 / 125000000 * 1000000 / 1000005; /////25 / 105 * 100 *1004 / 1001*1000000/1000845;
for (int b = 0; b < 4; b++, freq >>= 8) {
tfr_byte(freq & 0xFF);
}
tfr_byte(0x000); // Final control byte, all 0 for 9850 chip
}
else {
int32_t freq = frequency * 25 / 105 * 100 * 1004 / 1001 * 1000000 / 1000845;
for (int b = 0; b < 4; b++, freq >>= 8) {
tfr_byte(freq & 0xFF);
}
tfr_byte(0x001); // Final control byte, all 0 for 9850 chip
}
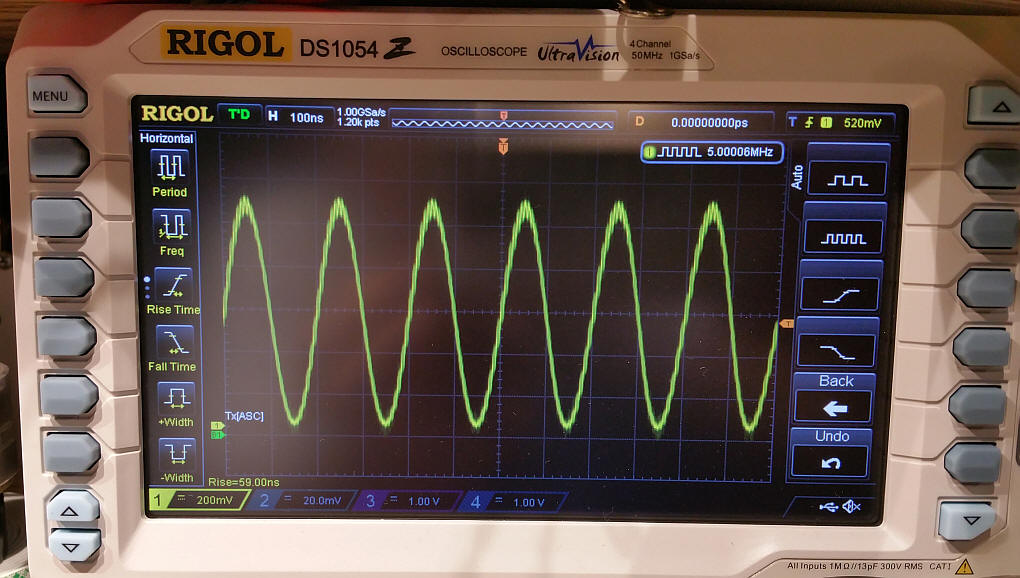
pulseHigh(FQ_UD); // Done! Should see output
}
void setup() {
Serial.begin(9600);
// configure arduino data pins for output
pinMode(FQ_UD, OUTPUT);
pinMode(W_CLK, OUTPUT);
pinMode(DATA, OUTPUT);
pinMode(RESET, OUTPUT);
pulseHigh(RESET);
pulseHigh(W_CLK);
pulseHigh(FQ_UD); // this pulse enables serial mode - Datasheet page 12 figure 10
AD9851 = EEPROM.read(0);
if (digitalRead(buttonPin) == LOW) { // button pressed
Serial.print(" AD9851=");
Serial.println(AD9851);
if (AD9851 == 0) {
AD9851 = 1;
Serial.println("==1");
EEPROM.write(0, AD9851);
}
else {
AD9851 = 0;
Serial.println("==0");
EEPROM.write(0, AD9851);
}
}
lcd.begin (16, 2); // <<----- My LCD was 16x2
// Switch on the backlight
lcd.setBacklightPin(BACKLIGHT_PIN, POSITIVE);
lcd.setBacklight(HIGH);
lcd.home (); // go home
lcd.print("Ver 2.3- 895");
if (AD9851 == 1) {
lcd.print("1");
}
else {
lcd.print("0");
}
// initialize the LED pin as an output:
pinMode(ledPin, OUTPUT);
// initialize the pushbutton pin as an input:
pinMode(buttonPin, INPUT);
// set the two pins as inputs with internal pullups
pinMode(pinA, INPUT_PULLUP);
pinMode(pinB, INPUT_PULLUP);
// Set up the timing of the polling
currentTime = millis();
lastTime = currentTime;
// Start the serial monitor for debugging
}
int changeamnt10 = 0;
void loop()
{
sendFrequency(reading);
//lcd.blink();
buttonState = digitalRead(buttonPin);
if (buttonState == LOW) { //LOW indicates that the button has been pressed
// turn LED on:
bpTime = millis(); // save time
while (digitalRead(buttonPin) == LOW) { // stay here till button released
}
if (millis() - bpTime <= 200 ) {
Serial.print("Millis<500 = ");
Serial.println(millis() - bpTime );
digitalWrite(ledPin, HIGH);
changeamnt = changeamnt * 10;
changeamnt10 = changeamnt10 + 1;
if (changeamnt == 10000000) {
changeamnt10 = 0;
changeamnt = 1;
}
}
else {
Serial.print("Millis>500 = ");
Serial.println(millis() - bpTime );
digitalWrite(ledPin, HIGH);
changeamnt = changeamnt / 10;
changeamnt10 = changeamnt10 - 1;
if (changeamnt <= 0) {
changeamnt10 = 10000000;
changeamnt = 1;
}
}
Serial.print("change = ");
Serial.println(changeamnt);
lcd.noBlink();
lcd.setCursor(0, 1); // 2nd line
lcd.print(changeamnt, DEC);
lcd.print(" ");
delay(200);
int zz = (changeamnt10);
Serial.print("zz = "); Serial.println(zz);
lcd.setCursor(4 - (zz + 3) + 5 + 8, 0);
lcd.blink();
}
else {
// turn LED off:
digitalWrite(ledPin, LOW);
}
// Read elapsed time
currentTime = millis();
// Check if it's time to read
if (currentTime >= (lastTime + 2)) // was 5
{
// read the two pins
encA = digitalRead(pinA);
encB = digitalRead(pinB);
// check if A has gone from high to low
if ((!encA) && (lastA))
{
// check if B is high
if (encB)
{
// clockwise
if (reading + changeamnt <= highest)
{
reading = reading + changeamnt;
Serial.println("fwd");
}
}
else
{
// anti-clockwise
if (reading - changeamnt >= 0)
{
reading = reading - changeamnt;
Serial.println("bkw");
}
}
// Output reading for debugging
Serial.println(reading);
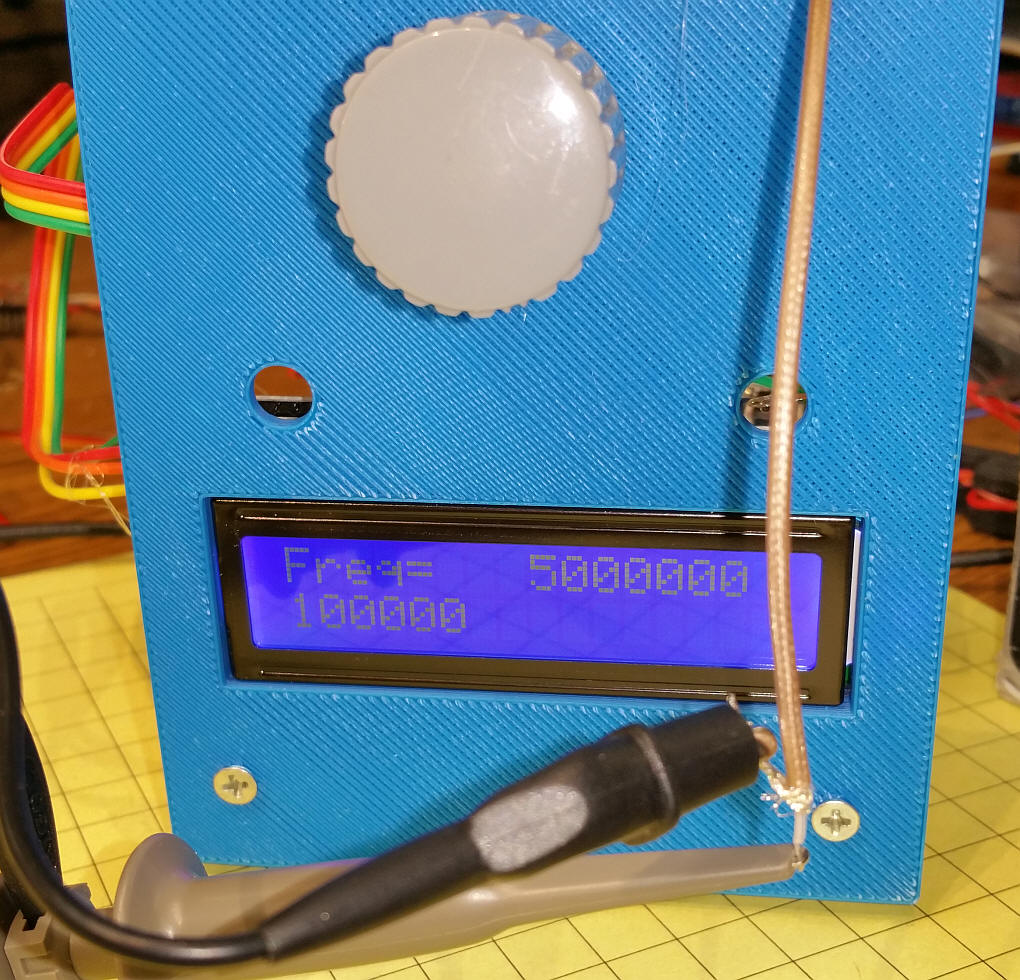
lcd.setCursor (0, 0); // go to start of 1st line
lcd.print("Freq= ");
decLength();
valLen = 15 - valLen;
lcd.setCursor(valLen, 0);
lcd.print(reading, DEC);
// lcd.print(" ");
int zz = (changeamnt10);
Serial.print("zz = "); Serial.println(zz);
lcd.setCursor(4 - (zz + 3) + 5 + 8, 0);
lcd.blink();
decLength();
// lcd.setCursor(9,1);
// lcd.print(valLen);
}
// store reading of A and millis for next loop
lastA = encA;
lastTime = currentTime;
}
}
void decLength() {
if (reading > 9999999)
valLen = 8;
else if (reading > 999999)
valLen = 7;
else if (reading > 99999)
valLen = 6;
else if (reading > 9999)
valLen = 5;
else if (reading > 999)
valLen = 4;
else if (reading > 99)
valLen = 3;
else if (reading > 9)
valLen = 2;
else
valLen = 1;
}
|