Precise Camera Panning
With Stepper Motors
Revised 10-29-11
(click on image below to see full panoramic view)
|
The objective of this project is
to design and construct a controller that will operate a geared
stepper motor that will rotate (pan) a digital camera to facilitate
taking wide area panoramic photos. The original design used a camera that could be triggered to take a photo electronically. Although this works well it limits the number of cameras that can be used. The shutter trigger mechanism has been redesigned to allow use with nearly any camera. The shutter button can be automatically pushed by a tiny electromechanical device called a servo. Click here for more information on the new shutter release. |
Click here to see sample images
| Hardware: The stepper motor is a 6 wire unipolar stepper manufactured by Hurst. It is part LSG35012E98P and sells for about $70.00.
The motor is controlled by a TI SN754410NE H-Bridge that is connected to a PIC 16fF88 microcontroller. The PIC sends pulses to the H-Bridge that move the motor in 1/10th degree/step increments in either a clockwise or counter clockwise direction. A 4 line by 20 character LCD display is used to show operational parameters and to facilitate changing settings. All adjustments and control input are done with a standard TV remote control utilizing Sony IR codes.
The digital camera is a Canon Elph from the PowerShot series. It can take a photograph under control of the PIC 16F88 thanks to the excellent work done by the folks at the CHDK Wiki. They have developed a set of programs and scripts that provide many updated and expanded capabilities to the PowerShot series of cameras. The one that is used in this project is a USB Remote Cable that allows you to trigger the camera and take a photograph by pulling a pin on the PIC high for a moment. |
| Schematic: Note: this schematic is for the revised circuit board described below.
|
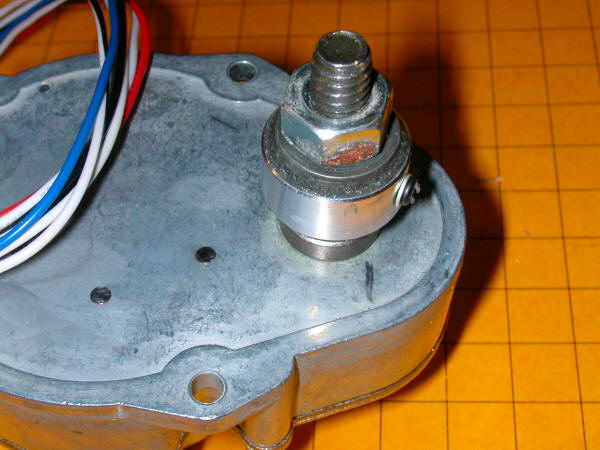
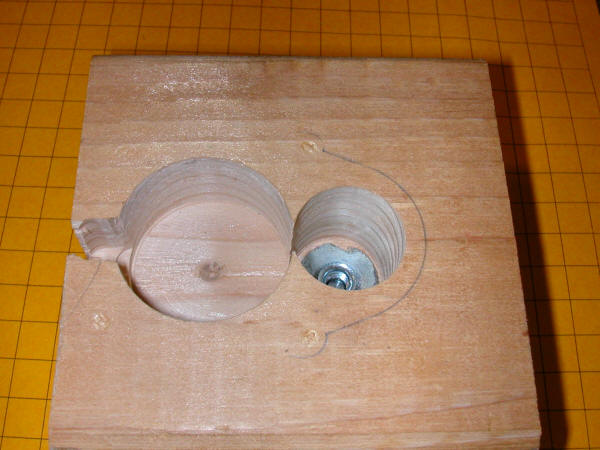
| Prototype Photos This photo shows the wood block that connects the stepper motor to the tripod, the motor and the camera.
The camera mounts to an appropriately threaded bolt attached to the stepper motor.
The hole one the left accepts the stepper motor. The one at the right is for a "T" nut that connects to the tripod mount.
This is the bottom of the adapter showing the other end of the "T" nut and the tripod mount that will thread into it.
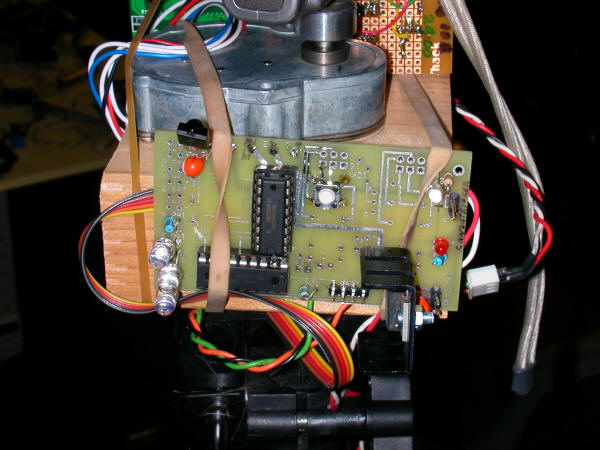
The stepper motor is mounted to a short piece of wood cut from a 2X4 and can be seen at the top of this photo. The main circuit board is in the front.
|
|
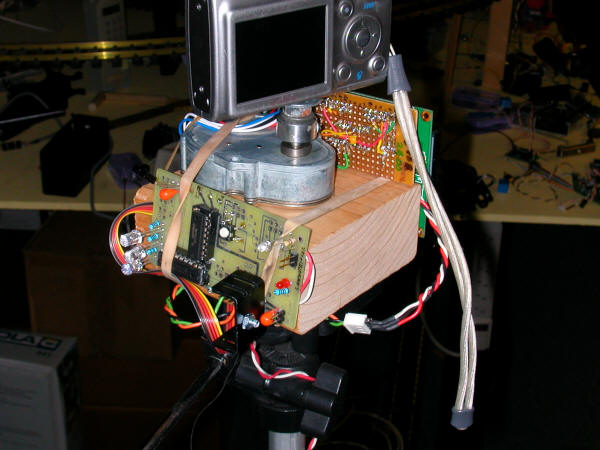
In this wider shot you can see the camera mounted on the stepper
motor. The whole thing is sitting on a tripod.
|
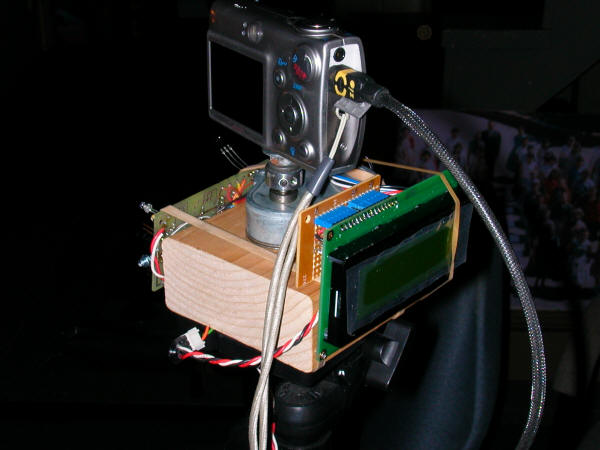
| In this photo you can see the LCD display and the USB cable that
is used to trigger the camera to take a photo.
|
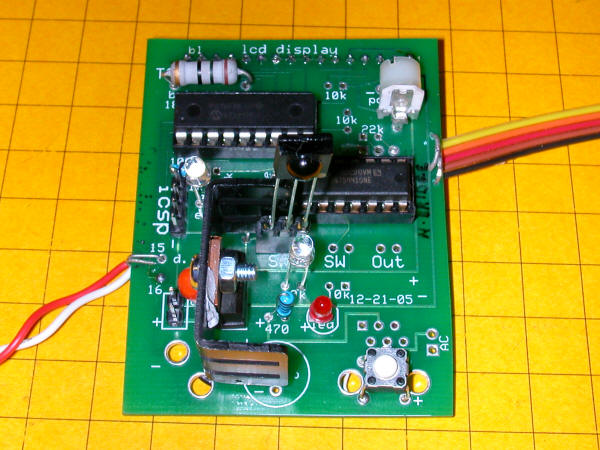
| Revised Circuit Board The prototype circuit board used an external LCD display that received commands via an RS-232 interface. Although it worked well programming it was cumbersome. For this reason the circuit board was revised so that it would support a directly attached LCD display. The display connects to the header at the top, the IR detector is the raised component in the center. The reset button is in the lower right.
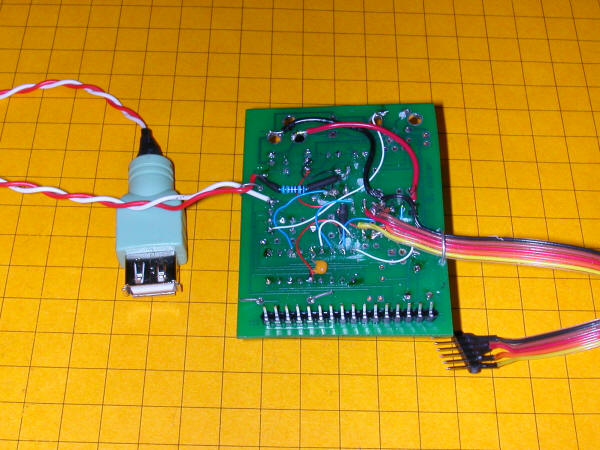
This view of the back of the board shows the LCD connector more clearly. It also shows the amount of rewiring that was necessary to repurpose the circuit board which was designed for another project.
The plug in the lower right goes to the 6 pin stepper motor cable. The USB plug at the left goes to the Canon camera's USB connection via the connecting cable that came with the camera.
|
Setup
|
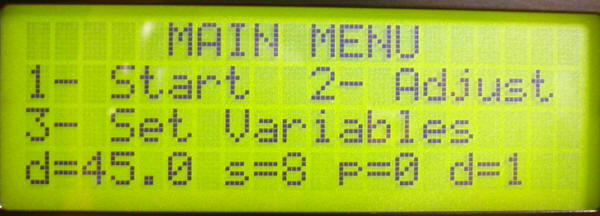
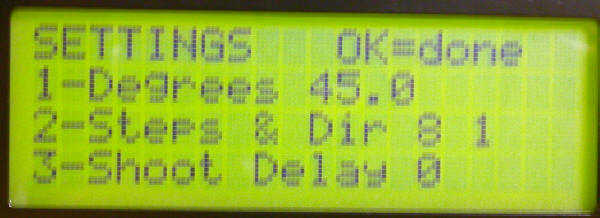
| Operation When power is applied the copyright screen is displayed. A short time later the Main Menu appears. Pressing 1 on the TV remote starts shooting, 2 allows you to adjust the position of the camera and 3 lets you change variable values. Note the that variables are shown in line 4: d=Degrees, s=Steps, p=Pause before / after shot and c=0 for clockwise and c=1 for counterclockwise.
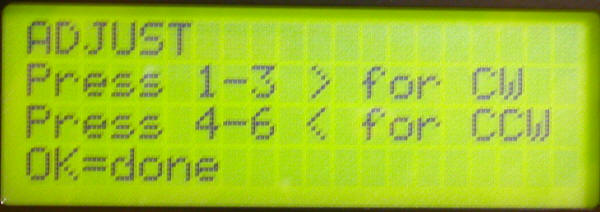
To adjust the camera a bit left or right press 1 (1 degree
steps), 2 (5 degree steps), 3 (10 deg.) or > (whatever your degree
setting is for)
The setting screen allows you to change the variables in the program. Pressing 1 allows you to enter a 4 digit number of degrees X 10. That means to enter 0450 for 45 degrees or 0225 for 22.5 degrees. The shots setting is a 4 digit number that is the number of shots to be taken in the sequence. The Shoot delay is the pause time before and after a shot is taken. It allows any motion of the tripod to settle and also allows for time exposures. It is a 2 digit number in seconds. If you enter 10 the system will pause for 1/2 of the time (5 seconds) before shooting and an additional 5 seconds after shooting..
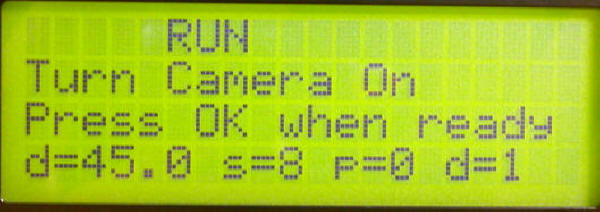
When you select Start this menu appears., Ready the camera and press the OK button on the TV remote.
While running the display shows the number of the shot it is on and the number of steps (in 1/10th of a degree) that the camera has moved.
|
Software - revision 09-12-08: |
There are three sets of sample images that were taken from the top of the back yard steps. The stepper motor was rotated 450 steps (45 degrees) between shots. Each set of photos makes up one 360 degree set of images.
The panning device was mounted on top of a tripod and leveled
.
Two of the sets of sample photos were taken with the panning unit moving in a clockwise direction and one set was taken moving in a counter clockwise direction.
If you look carefully you will note that there is overlap between each image.
The images are quite large (3 to 4 meg each) - the pages load slowly. The images display at a width of 600 pixels to make viewing easier - to see the full sized image right click on it and select "view image"
Click here for sample images 1